Spring deformation force. Hooke's Law - definition and formula. Law established by Hooke
Types of deformations
Deformation called a change in the shape, size or volume of the body. Deformation can be caused by external forces applied to the body. Deformations that completely disappear after the action of external forces on the body ceases are called elastic, and deformations that persist even after external forces have ceased to act on the body - plastic. Distinguish tensile strain or compression(unilateral or comprehensive), bending, torsion And shift.
Elastic forces
For deformities solid its particles (atoms, molecules, ions), located at the nodes of the crystal lattice, are displaced from their equilibrium positions. This displacement is counteracted by the interaction forces between particles of a solid body, which keep these particles at a certain distance from each other. Therefore, with any type of elastic deformation, internal forces arise in the body that prevent its deformation.
The forces that arise in a body during its elastic deformation and are directed against the direction of displacement of the particles of the body caused by the deformation are called elastic forces. Elastic forces act in any section of a deformed body, as well as at the point of its contact with the body causing deformation. In the case of unilateral tension or compression, the elastic force is directed along the straight line along which the external force acts, causing deformation of the body, opposite to the direction of this force and perpendicular to the surface of the body. The nature of elastic forces is electrical.
We will consider the case of the occurrence of elastic forces during unilateral tension and compression of a solid body.
Hooke's law
The connection between the elastic force and the elastic deformation of a body (at small deformations) was experimentally established by Newton's contemporary, the English physicist Hooke. The mathematical expression of Hooke's law for unilateral tension (compression) deformation has the form:
where f is the elastic force; x - elongation (deformation) of the body; k is a proportionality coefficient depending on the size and material of the body, called rigidity. The SI unit of stiffness is newton per meter (N/m).
Hooke's law for one-sided tension (compression) is formulated as follows: The elastic force arising during deformation of a body is proportional to the elongation of this body.
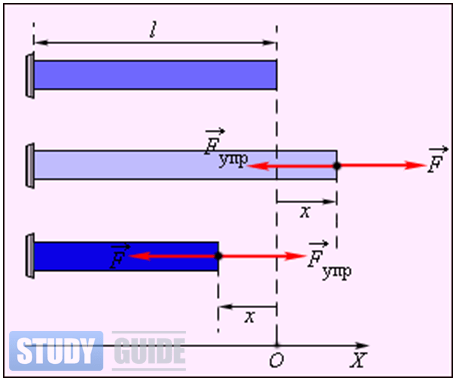
Let's consider an experiment illustrating Hooke's law. Let the axis of symmetry of the cylindrical spring coincide with the straight line Ax (Fig. 20, a). One end of the spring is fixed in the support at point A, and the second is free and the body M is attached to it. When the spring is not deformed, its free end is located at point C. This point will be taken as the origin of the coordinate x, which determines the position of the free end of the spring.
Let's stretch the spring so that its free end is at point D, the coordinate of which is x > 0: At this point the spring acts on the body M with an elastic force
Let us now compress the spring so that its free end is at point B, whose coordinate is x
It can be seen from the figure that the projection of the elastic force of the spring onto the Ax axis always has a sign opposite to the sign of the x coordinate, since the elastic force is always directed towards the equilibrium position C. In Fig. 20, b shows a graph of Hooke's law. The values of elongation x of the spring are plotted on the abscissa axis, and the elastic force values are plotted on the ordinate axis. The dependence of fx on x is linear, so the graph is a straight line passing through the origin of coordinates.
Let's consider another experiment.
Let one end of a thin steel wire be fixed to a bracket, and a load suspended from the other end, the weight of which is an external tensile force F acting on the wire perpendicular to its cross section (Fig. 21).
The action of this force on the wire depends not only on the force modulus F, but also on the cross-sectional area of the wire S.
Under the influence of an external force applied to it, the wire is deformed and stretched. If the stretch is not too great, this deformation is elastic. In an elastically deformed wire, an elastic force f unit arises. According to Newton's third law, the elastic force is equal in magnitude and opposite in direction to the external force acting on the body, i.e.
f up = -F (2.10)
The state of an elastically deformed body is characterized by the value s, called normal mechanical stress(or, for short, just normal voltage). Normal stress s is equal to the ratio of the modulus of the elastic force to the cross-sectional area of the body:
s = f up /S (2.11)
Let the initial length of the unstretched wire be L 0 . After applying force F, the wire stretched and its length became equal to L. The quantity DL = L - L 0 is called absolute wire elongation. The quantity e = DL/L 0 (2.12) is called relative body elongation. For tensile strain e>0, for compressive strain e< 0.
Observations show that for small deformations the normal stress s is proportional to the relative elongation e:
s = E|e|. (2.13)
Formula (2.13) is one of the types of writing Hooke’s law for unilateral tension (compression). In this formula, the relative elongation is taken modulo, since it can be both positive and negative. The proportionality coefficient E in Hooke's law is called the longitudinal modulus of elasticity (Young's modulus).
Let us establish the physical meaning of Young's modulus. As can be seen from formula (2.12), e = 1 and L = 2L 0 for DL = L 0 . From formula (2.13) it follows that in this case s = E. Consequently, Young’s modulus is numerically equal to the normal stress that should arise in the body if its length is doubled. (if Hooke's law were true for such a large deformation). From formula (2.13) it is also clear that in the SI Young’s modulus is expressed in pascals (1 Pa = 1 N/m2).
Forceelasticity- this is the power which occurs when the body is deformed and which seeks to restore the previous shape and size of the body.
The elastic force arises as a result of electromagnetic interaction between the molecules and atoms of a substance.
The simplest version of deformation can be considered using the example of compression and extension of a spring.
In this picture (x>0) — tensile deformation; (x< 0) — compression deformation. (Fx) - external force.
In the case when the deformation is the most insignificant, i.e. small, the elastic force is directed in the direction that is opposite to the direction of the moving particles of the body and is proportional to the deformation of the body:
Fx = Fcontrol = - kx
Using this relationship, Hooke's law, which was established experimentally, is expressed. Coefficient k is commonly called body rigidity. The stiffness of a body is measured in newtons per meter (N/m) and depends on the size and shape of the body, as well as on the materials from which the body is composed.
In physics, Hooke's law for determining the compression or tension deformation of a body is written in a completely different form. In this case, the relative deformation is called

Robert Hooke
(18.07.1635 - 03.03.1703)
English naturalist, encyclopedist
attitude ε = x/l . At the same time, stress is the cross-sectional area of a body after relative deformation:
σ = F / S = -Fcontrol / S
In this case, Hooke’s law is formulated as follows: the stress σ is proportional to the relative deformation ε . In this formula the coefficient E called Young's modulus. This module does not depend on the shape of the body and its dimensions, but at the same time, it directly depends on the properties of the materials from which the body consists. For various materials Young's modulus fluctuates over a fairly wide range. For example, for rubber E ≈ 2·106 N/m2, and for steel E ≈ 2·1011 N/m2 (i.e. five orders of magnitude more).
It is quite possible to generalize Hooke's law in cases where more complex deformations occur. For example, consider bending deformation. Let's consider a rod that rests on two supports and has a significant deflection.

From the side of the support (or suspension), an elastic force acts on this body; this is the support reaction force. The reaction force of the support when the bodies come into contact will be directed strictly perpendicular to the contact surface. This force is usually called the normal pressure force.
Let's consider the second option. The body lies on a stationary horizontal table. Then the reaction of the support balances the force of gravity and it is directed vertically upward. Moreover, body weight is considered the force with which the body acts on the table.
Elastic forces and deformations
Definition 1
The force that arises in a body as a result of its deformation and tends to return it to its initial state is called the elastic force.
All bodies of the material world are subject to various types of deformations. Deformations arise due to movement and, as a consequence, changes in the position of body particles relative to each other. According to the degree of reversibility we can distinguish:
- elastic, or reversible deformations;
- plastic (residual) or irreversible deformations.
In cases where a body, upon completion of the action of forces leading to deformation, restores its original parameters, the deformation is called elastic.
It is worth noting that during elastic deformation, the effect of external force on the body does not exceed the elastic limit. Thus, the elastic forces compensate external influence on the body.
Otherwise, the deformation is plastic or residual. A body subjected to an impact of this nature does not restore its original size and shape.
Elastic forces arising in bodies are not able to completely balance the forces causing plastic deformation.
In general, a number of simple deformations are distinguished:
- stretching (compression);
- bend;
- shift;
- torsion.
As a rule, deformations are often a combination of several types of impact presented, which makes it possible to reduce all deformations to the two most common types, namely tension and shear.
Characteristics of elastic forces
The modulus of elastic force acting per unit area is a physical quantity called stress (mechanical).
Mechanical stress, depending on the direction of application of force, can be:
- normal (directed normal to the surface, $σ$);
- tangential (directed tangent to the surface, $τ$).
Note 1
The degree of deformation is characterized by a quantitative measure - relative deformation.
So, for example, the relative change in the length of the rod can be described by the formula:
$ε=\frac(\Delta l)(l)$,
and relative longitudinal tension (compression):
$ε’=\frac(\Delta d)(d)$, where:
$l$ is the length, and $d$ is the diameter of the rod.
Deformations $ε$ and $ε’$ occur simultaneously and have opposite signs, due to the fact that during stretching, the change in the length of the body is positive, and the change in diameter is negative; in cases with compression of the body, the signs change to the opposite. Their relationship is described by the formula:
Here $μ$ is Poisson's ratio, depending on the properties of the material.
Hooke's law
By their nature, elastic forces are electromagnetic, non-fundamental forces, and, therefore, they are described by approximate formulas.
Thus, it has been empirically established that for small deformations the relative elongation and stress are proportional, or
Here $E$ is the proportionality coefficient, also called Young's modulus. It takes on a value at which the relative elongation is equal to unity. Young's modulus is measured in newtons per square meter(pascals).
According to Hooke's law, the elongation of a rod during elastic deformation is proportional to the force acting on the rod, or:
$F=\frac(ES)(l)\Delta l=k\Delta l$
The value $k$ is called the elasticity coefficient.
The deformation of solids is described by Hooke's law only up to the limit of proportionality. With increasing stress, the deformation ceases to be linear, but until the elastic limit is reached, residual deformations do not occur. Thus, Hooke's Law is valid exclusively for elastic deformations.
Plastic deformations
With a further increase in the acting forces, residual deformations occur.
Definition 2
The value of mechanical stress at which noticeable residual deformation occurs is called the yield strength ($σт$).
Further, the degree of deformation increases without increasing stress until the ultimate strength ($σр$) is reached, when the body is destroyed. If we graphically depict the return of the body to its original state, then the area between the points $σт$ and $σр$ will be called the yield region (plastic deformation region). Depending on the size of this area, all materials are divided into viscous, in which the yield area is significant, and brittle, in which the yield area is minimal.
Note that previously we considered the influence of forces applied in the direction of the normal to the surface. If external forces were applied tangentially, shear deformation occurs. In this case, a tangential stress arises at each point of the body, determined by the modulus of force per unit area, or:
$τ=\frac(F)(S)$.
The relative shift, in turn, can be calculated using the formula:
$γ=\frac(1)(G)τ$, where $G$ is the shear modulus.
The shear modulus takes the tangential stress value at which the shear value is equal to unity; $G$ is measured in the same way as voltage, in pascals.
DEFINITION
Deformations are any changes in the shape, size and volume of the body. Deformation determines the final result of the movement of body parts relative to each other.
DEFINITION
Elastic deformations are called deformations that completely disappear after the removal of external forces.
Plastic deformations are called deformations that remain fully or partially after the cessation of external forces.
The ability to elastic and plastic deformations depends on the nature of the substance of which the body is composed, the conditions in which it is located; methods of its manufacture. For example, if you take different types of iron or steel, you can find completely different elastic and plastic properties in them. At normal room temperatures, iron is a very soft, ductile material; hardened steel, on the contrary, is a hard, elastic material. The plasticity of many materials is a condition for their processing and for the manufacture of the necessary parts from them. Therefore, it is considered one of the most important technical properties of a solid.
When a solid body is deformed, particles (atoms, molecules or ions) are displaced from their original equilibrium positions to new positions. In this case, the force interactions between individual particles of the body change. As a result, internal forces arise in the deformed body, preventing its deformation.
There are tensile (compressive), shear, bending, and torsional deformations.
Elastic forces
DEFINITION
Elastic forces– these are the forces that arise in a body during its elastic deformation and are directed in the direction opposite to the displacement of particles during deformation.
Elastic forces are of an electromagnetic nature. They prevent deformations and are directed perpendicular to the contact surface of interacting bodies, and if bodies such as springs or threads interact, then the elastic forces are directed along their axis.
The elastic force acting on the body from the support is often called the support reaction force.
DEFINITION
Tensile strain (linear strain) is a deformation in which only one linear dimension of the body changes. Her quantitative characteristics are absolute and relative elongation.
Absolute elongation:
where and is the length of the body in the deformed and undeformed state, respectively.
Relative extension:
Hooke's law
Small and short-term deformations with a sufficient degree of accuracy can be considered as elastic. For such deformations, Hooke’s law is valid:
where is the projection of force onto the rigidity axis of the body, depending on the size of the body and the material from which it is made, the unit of rigidity in the SI system is N/m.
Examples of problem solving
EXAMPLE 1
| Exercise | A spring with stiffness N/m in an unloaded state has a length of 25 cm. What will be the length of the spring if a load weighing 2 kg is suspended from it? |
| Solution | Let's make a drawing.
An elastic force also acts on a load suspended on a spring. Projecting this vector equality onto the coordinate axis, we get: According to Hooke's law, elastic force: so we can write: where does the length of the deformed spring come from: Let us convert the length of the undeformed spring, cm, to the SI system. Substituting numerical values into the formula physical quantities, let's calculate: |
| Answer | The length of the deformed spring will be 29 cm. |

EXAMPLE 2
| Exercise | A body weighing 3 kg is moved along a horizontal surface using a spring with stiffness N/m. How much will the spring lengthen if under its action, with uniformly accelerated motion, the speed of the body changes from 0 to 20 m/s in 10 s? Ignore friction. |
| Solution | Let's make a drawing.
The body is acted upon by the reaction force of the support and the elastic force of the spring. |

The coefficient E in this formula is called Young's modulus. Young's modulus depends only on the properties of the material and does not depend on the size and shape of the body. For different materials, Young's modulus varies widely. For steel, for example, E ≈ 2·10 11 N/m 2 , and for rubber E ≈ 2·10 6 N/m 2 , that is, five orders of magnitude less.
Hooke's law can be generalized to the case of more complex deformations. For example, when bending deformation the elastic force is proportional to the deflection of the rod, the ends of which lie on two supports (Fig. 1.12.2).
 |
| Figure 1.12.2. Bend deformation. |
The elastic force acting on the body from the side of the support (or suspension) is called ground reaction force. When the bodies come into contact, the support reaction force is directed perpendicular contact surfaces. That's why it's often called strength normal pressure. If a body lies on a horizontal stationary table, the support reaction force is directed vertically upward and balances the force of gravity: The force with which the body acts on the table is called body weight.
In technology, spiral-shaped springs(Fig. 1.12.3). When springs are stretched or compressed, elastic forces arise, which also obey Hooke's law. The coefficient k is called spring stiffness. Within the limits of applicability of Hooke's law, springs are capable of greatly changing their length. Therefore, they are often used to measure forces. A spring whose tension is measured in units of force is called dynamometer. It should be borne in mind that when a spring is stretched or compressed, complex torsional and bending deformations occur in its coils.
 |
| Figure 1.12.3. Spring extension deformation. |
Unlike springs and some elastic materials (for example, rubber), the tensile or compressive deformation of elastic rods (or wires) obeys Hooke's linear law within very narrow limits. For metals, the relative deformation ε = x / l should not exceed 1%. With large deformations, irreversible phenomena (fluidity) and destruction of the material occur.
§ 10. Elastic force. Hooke's law
Types of deformations
Deformation called a change in the shape, size or volume of the body. Deformation can be caused by external forces applied to the body.
Deformations that completely disappear after the action of external forces on the body ceases are called elastic, and deformations that persist even after external forces have ceased to act on the body - plastic.
Distinguish tensile strain or compression(unilateral or comprehensive), bending, torsion And shift.
Elastic forces
When a solid body is deformed, its particles (atoms, molecules, ions) located at the nodes of the crystal lattice are displaced from their equilibrium positions. This displacement is counteracted by the interaction forces between particles of a solid body, which keep these particles at a certain distance from each other. Therefore, with any type of elastic deformation, internal forces arise in the body that prevent its deformation.
The forces that arise in a body during its elastic deformation and are directed against the direction of displacement of the particles of the body caused by the deformation are called elastic forces. Elastic forces act in any section of a deformed body, as well as at the point of its contact with the body causing deformation. In the case of unilateral tension or compression, the elastic force is directed along the straight line along which the external force acts, causing deformation of the body, opposite to the direction of this force and perpendicular to the surface of the body. The nature of elastic forces is electrical.
We will consider the case of the occurrence of elastic forces during unilateral tension and compression of a solid body.
Hooke's law
The connection between the elastic force and the elastic deformation of a body (at small deformations) was experimentally established by Newton's contemporary, the English physicist Hooke. The mathematical expression of Hooke's law for unilateral tension (compression) deformation has the form
where f is the elastic force; x - elongation (deformation) of the body; k is a proportionality coefficient depending on the size and material of the body, called rigidity. The SI unit of stiffness is newton per meter (N/m).
Hooke's law for one-sided tension (compression) is formulated as follows: The elastic force arising during deformation of a body is proportional to the elongation of this body.
 Let's consider an experiment illustrating Hooke's law. Let the axis of symmetry of the cylindrical spring coincide with the straight line Ax (Fig. 20, a). One end of the spring is fixed in the support at point A, and the second is free and the body M is attached to it. When the spring is not deformed, its free end is located at point C. This point will be taken as the origin of the coordinate x, which determines the position of the free end of the spring.
Let's consider an experiment illustrating Hooke's law. Let the axis of symmetry of the cylindrical spring coincide with the straight line Ax (Fig. 20, a). One end of the spring is fixed in the support at point A, and the second is free and the body M is attached to it. When the spring is not deformed, its free end is located at point C. This point will be taken as the origin of the coordinate x, which determines the position of the free end of the spring.
Let's stretch the spring so that its free end is at point D, the coordinate of which is x>0: At this point the spring acts on the body M with an elastic force
Let us now compress the spring so that its free end is at point B, whose coordinate is x<0. В этой точке пружина действует на тело М упругой силой
It can be seen from the figure that the projection of the elastic force of the spring onto the Ax axis always has a sign opposite to the sign of the x coordinate, since the elastic force is always directed towards the equilibrium position C. In Fig. 20, b shows a graph of Hooke's law. The values of elongation x of the spring are plotted on the abscissa axis, and the elastic force values are plotted on the ordinate axis. The dependence of fx on x is linear, so the graph is a straight line passing through the origin of coordinates.
 Let's consider another experiment.
Let's consider another experiment.
Let one end of a thin steel wire be fixed to a bracket, and a load suspended from the other end, the weight of which is an external tensile force F acting on the wire perpendicular to its cross section (Fig. 21).
The action of this force on the wire depends not only on the force modulus F, but also on the cross-sectional area of the wire S.
Under the influence of an external force applied to it, the wire is deformed and stretched. If the stretch is not too great, this deformation is elastic. In an elastically deformed wire, an elastic force f unit arises.
According to Newton's third law, the elastic force is equal in magnitude and opposite in direction to the external force acting on the body, i.e.
f up = -F (2.10)
The state of an elastically deformed body is characterized by the value s, called normal mechanical stress(or, for short, just normal voltage). Normal stress s is equal to the ratio of the modulus of the elastic force to the cross-sectional area of the body:
s=f up /S (2.11)

Let the initial length of the unstretched wire be L 0 . After applying force F, the wire stretched and its length became equal to L. The value DL=L-L 0 is called absolute wire elongation. Size
called relative body elongation. For tensile strain e>0, for compressive strain e<0.
Observations show that for small deformations the normal stress s is proportional to the relative elongation e:
Formula (2.13) is one of the types of writing Hooke’s law for unilateral tension (compression). In this formula, the relative elongation is taken modulo, since it can be both positive and negative. The proportionality coefficient E in Hooke's law is called the longitudinal modulus of elasticity (Young's modulus).
Let us establish the physical meaning of Young's modulus. As can be seen from formula (2.12), e=1 and L=2L 0 with DL=L 0 . From formula (2.13) it follows that in this case s=E. Consequently, Young's modulus is numerically equal to the normal stress that should arise in the body if its length is doubled. (if Hooke's law were true for such a large deformation). From formula (2.13) it is also clear that in the SI Young’s modulus is expressed in pascals (1 Pa = 1 N/m2).
Tension diagram
Using formula (2.13), from the experimental values of the relative elongation e, one can calculate the corresponding values of the normal stress s arising in the deformed body and construct a graph of the dependence of s on e. This graph is called stretch diagram. A similar graph for a metal sample is shown in Fig. 22. In section 0-1, the graph looks like a straight line passing through the origin. This means that up to a certain stress value, the deformation is elastic and Hooke’s law is satisfied, i.e., the normal stress is proportional to the relative elongation. The maximum value of normal stress s p, at which Hooke’s law is still satisfied, is called limit of proportionality.
With a further increase in load, the dependence of stress on relative elongation becomes nonlinear (section 1-2), although the elastic properties of the body are still preserved. The maximum value s of normal stress, at which residual deformation does not yet occur, is called elastic limit. (The elastic limit exceeds the proportionality limit by only hundredths of a percent.) Increasing the load above the elastic limit (section 2-3) leads to the fact that the deformation becomes residual.
Then the sample begins to elongate at almost constant stress (section 3-4 of the graph). This phenomenon is called material fluidity. The normal stress s t at which the residual deformation reaches a given value is called yield strength.
At stresses exceeding the yield strength, the elastic properties of the body are restored to a certain extent, and it again begins to resist deformation (section 4-5 of the graph). The maximum value of normal stress spr, above which the sample ruptures, is called tensile strength.
Energy of an elastically deformed body
Substituting the values of s and e from formulas (2.11) and (2.12) into formula (2.13), we obtain
f up /S=E|DL|/L 0 .
whence it follows that the elastic force fуn, arising during deformation of the body, is determined by the formula
f up =ES|DL|/L 0 . (2.14)
Let us determine the work A def performed during deformation of the body, and the potential energy W of the elastically deformed body. According to the law of conservation of energy,
W=A def. (2.15)
As can be seen from formula (2.14), the modulus of the elastic force can change. It increases in proportion to the deformation of the body. Therefore, to calculate the work of deformation, it is necessary to take the average value of the elastic force
Then determined by the formula A def =
A def = ES|DL| 2 /2L 0 .
Substituting this expression into formula (2.15), we find the value of the potential energy of an elastically deformed body:
W=ES|DL| 2 /2L 0 . (2.17)
For an elastically deformed spring ES/L 0 =k is the spring stiffness; x is the extension of the spring. Therefore, formula (2.17) can be written in the form
W=kx 2 /2. (2.18)
Formula (2.18) determines the potential energy of an elastically deformed spring.
Questions for self-control:
What is deformation?
What deformation is called elastic? plastic?
Name the types of deformations.
What is elastic force? How is it directed? What is the nature of this force?
How is Hooke's law formulated and written for unilateral tension (compression)?
What is rigidity? What is the SI unit of hardness?
Draw a diagram and explain an experiment that illustrates Hooke's law. Draw a graph of this law.
After making an explanatory drawing, describe the process of stretching a metal wire under load.
What is normal mechanical stress? What formula expresses the meaning of this concept?
What is called absolute elongation? relative elongation? What formulas express the meaning of these concepts?
What is the form of Hooke's law in a record containing normal mechanical stress?
What is called Young's modulus? What is its physical meaning? What is the SI unit of Young's modulus?
Draw and explain the stress-strain diagram of a metal specimen.
What is called the limit of proportionality? elasticity? turnover? strength?
Obtain formulas that determine the work of deformation and potential energy of an elastically deformed body.
